初めまして。コアシステムジャパンで長期インターン生をしているBit(ビット)です。
今回、空気の力で触覚情報を捉えるデバイスを、当社が開発するヘテロコア光ファイバーセンサーで実現できたのでご紹介します!
そもそも触覚って?
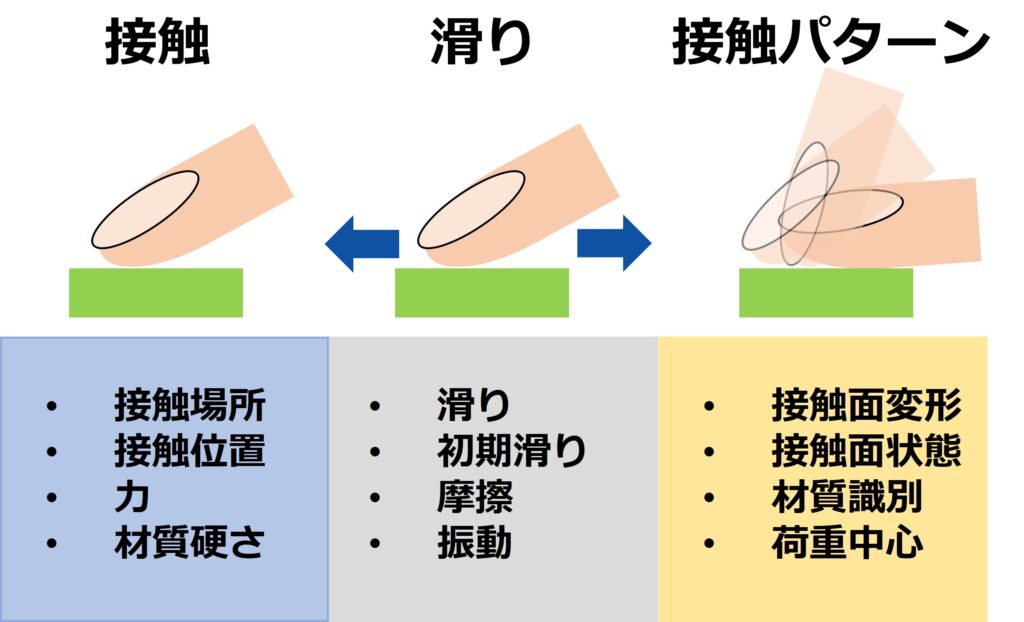
触覚とは、皮膚表面に点在する機械受容器(いわゆるセンサー)が感じ取る情報を指します。触覚による知覚は、目や鼻といった他の感覚器官とちがい、モノの硬さや表面粗さ,温度や振動など、取得できる情報の種類に富んでいます。生理学的には、人間のもつ触覚の機械受容器やその知覚メカニズムについて様々な現象が解明されてきていますが、触覚をセンサーで工学的に再現し、取得できた情報をどのようにして私たちが普段感じ取る“感覚”に変換しているのか、触覚の認識モデルは未解明な部分が多く存在しています。
私は触覚センサーをロボットに搭載し動かしたいと考えていますが、ロボット工学では、この触覚を再現し物体から得られる硬さや柔らかさ、温度や質感などの触覚情報を考慮した制御による、把持戦略、つまりモノを適切に掴む動作をロボットが行うためにはどうしたらいいのか、ということが重要となっていきます。
空気圧から触覚情報を取得する、i-Line HOPS(Haptic by Optical Pressure Senser)の開発
コアシステムジャパンと創価大学の共同研究で新たに圧力検知型センサー「i-Line HOPS」を開発しました!「i-Line HOPS」は空気圧変化を触覚情報として取得することを目的としたセンサモジュールです。
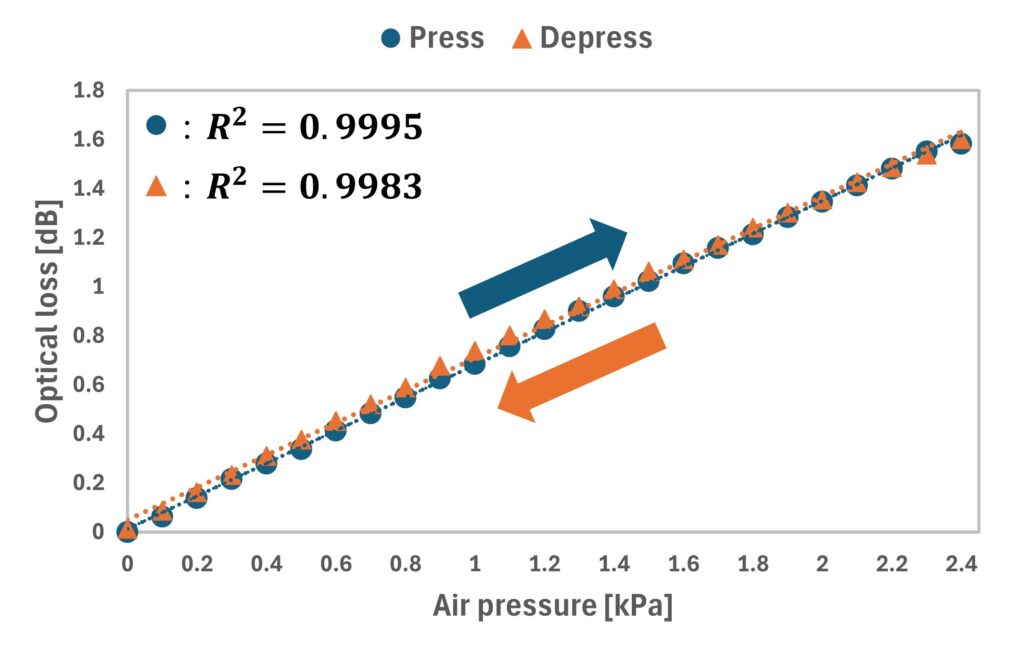
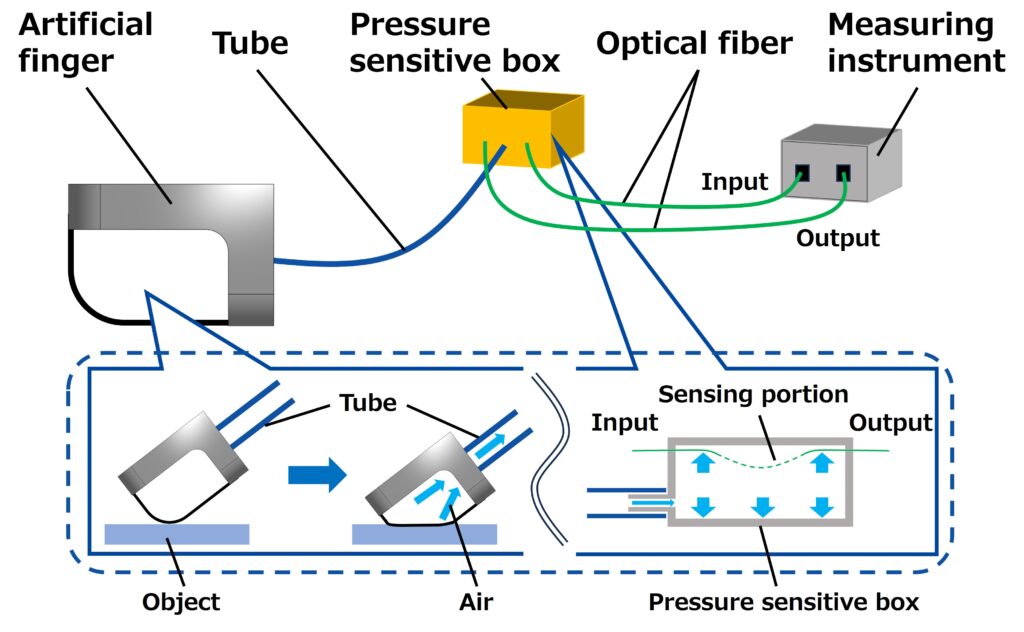
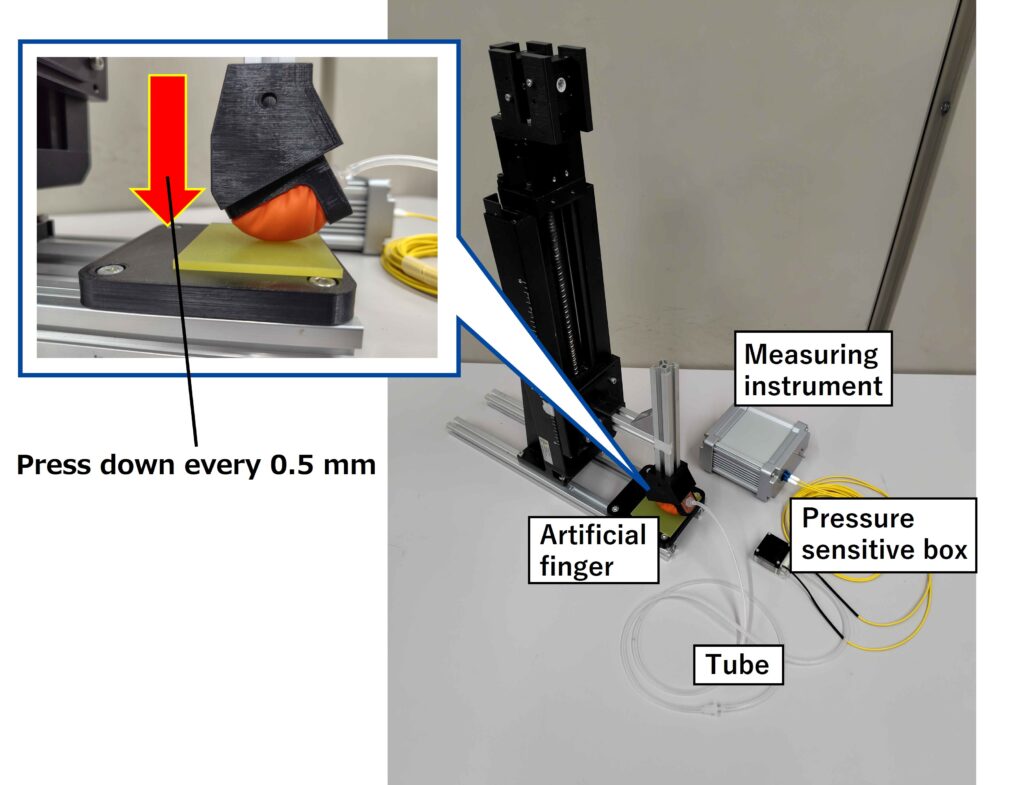
今回開発した触覚デバイスは、接触ユニットである人工指にバルーン形状構造を採用しました。チューブを介してi-Line HOPSと接続されおり、接触ユニットが物体に触れると、中の空気がチューブ内を通り、デバイスの内圧が変化します。その変化をセンサーで捉えることで、空気圧の変化を触覚情報として取得することが可能となります。
物体への押し込み実験
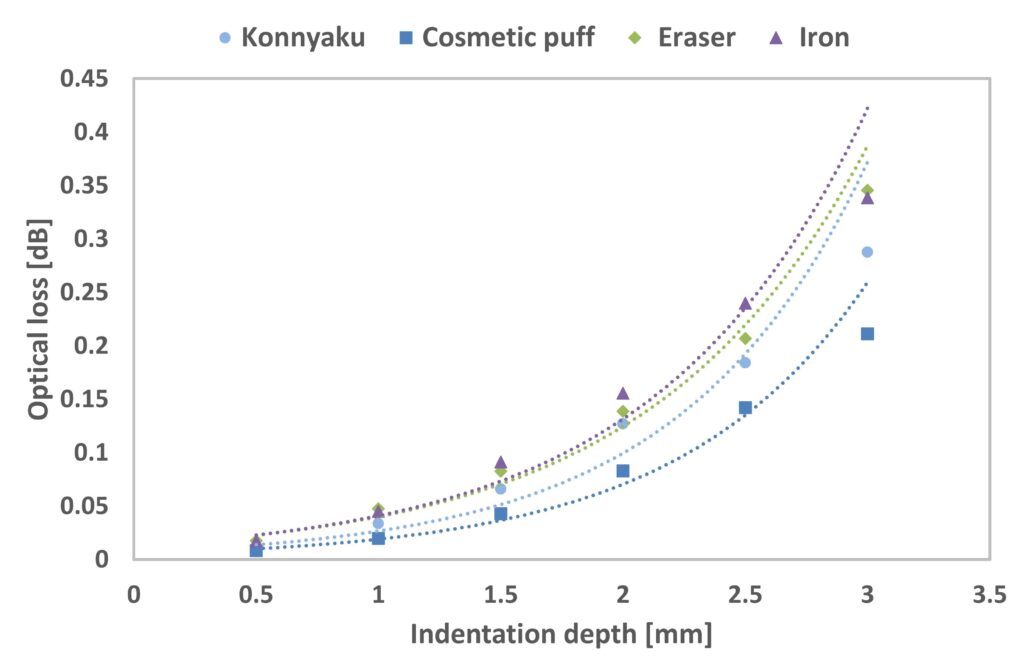
今回は試しに、この「i-Line HOPS」を使って硬さの異なる様々な物体への押し込み実験を行ってみました。使用した物体は硬い順で、鉄、消しゴム、化粧用パフ、こんにゃくを使用し、それぞれ接触ユニットで押し込み動作をさせたときの波形を観察しました。
結果として、硬さの違いによってモノに押し込んだときのデバイスの反応に違いがあることが分かりました。実際に触ってみて“硬い”と感じる物体ほど、デバイスの反応が大きくなることから、ある程度の硬軟感は識別できそう! 現在は、触覚情報の中でも基本的な“硬軟感”のみに着目して実験をしましたが、今後はさらなる「i-Line HOPS」のポテンシャルを確かめるべく、様々な実験・デバイスの構成を模索していきたいです!(いつか自分が開発したセンサーでロボットを動かしたいなぁ)