
ヘテロコア式光ファイバーを組み込んだ、i-Line メカノレセプター(触覚受容器)を開発
「i-Line メカノレセプタ―」は、人間の指先にそなわる繊細な触覚をロボットに与えることができる光ファイバーセンサーです。光ファイバーセンサーは、髪の毛ほどに細くて柔らかいという特徴から、構造物の中に組み込める”光の神経”としてあらゆる構造にセンサー機能を組み込むことができます。また、これまでの電気式の触覚センサーとは違い、センサー部・伝送ケーブルで電気的なノイズ・スパークが発生することはなく、例えばロボット駆動時のモータの電磁ノイズ等によってセンサーの信号が乱れる心配はありません。
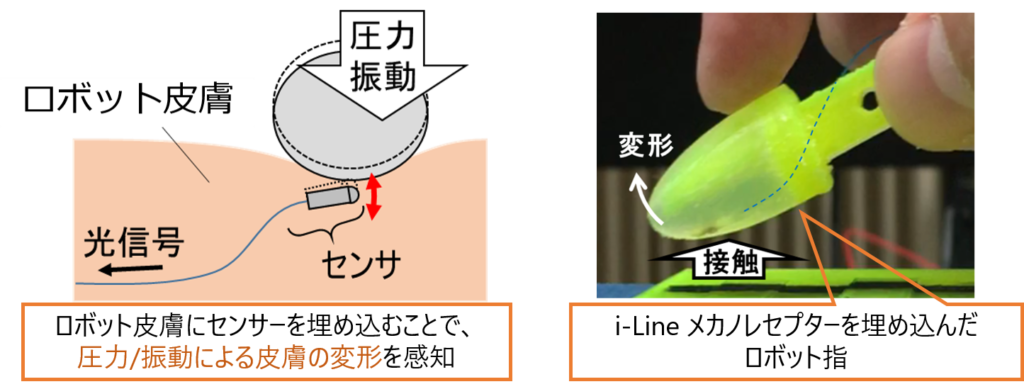
コアシステムジャパンと創価大学の共同研究により開発された「i-Line メカノレセプタ―(触覚受容器)」は、柔らかい皮膚のような素材にセンサー部を埋め込むことで、素材の変形を光信号として受け取ることができます。独自の光ファイバー技術により、細く柔らかい光ファイバー自体の曲げを感じ取るので、皮膚素材の柔らかさを阻害することなく、違和感なく埋め込むことができます。さらに、静的な圧力から1kHz近い高周波振動まで、あらゆる触覚刺激を1つのセンサーで捉えることも可能となりました。
研究例)光ファイバーで質感は測れるか?
テーブルに置かれている”リンゴ”と”みかん”を、人は手に持って指で触れて判別することができます。それでは、ロボットは指に触れるだけで”リンゴ”と”みかん”の触り心地の違い(質感)を判別することはできるでしょうか?
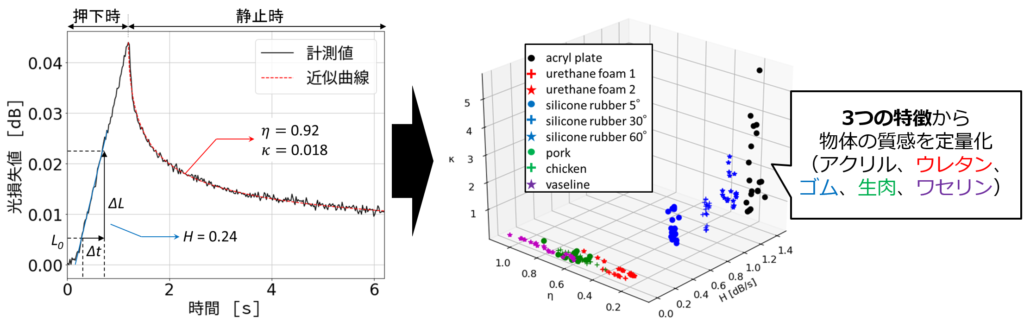
「i-Line メカノレセプタ―」と埋め込んだロボット指(上図)を、異なる質感をもつさまざまな物体に押し当てたときの光信号を計測してみます。ロボット指を対象の物体に向けて押下したときには、ロボット指の皮膚は物体からの圧力を受けて、徐々に変形していきます。その後、一定の押し込みを受けた後でロボット指を静止させると、皮膚が物体から受ける圧力はしだいに減少していきます(応力緩和現象)。この押下時・静止時における光信号の変化グラフから3つの特徴量を取り出すことによって、物体の”見かけの硬さ(H)”、”塑性度合い(η)”、”粘稠度(κ)”が数値化され、人が指先でなんとなく感じ取る物体の質感を定量的に分析・判別できることが分かりました(下図)。
参考文献
- H. Yamazaki et al.: IEEE Sensors Journal, 17 (16), 5123-5129 https://ieeexplore.ieee.org/abstract/document/7961254
- H. Yamazaki et al.: Presented at The 7th Asia-Pacific Optical Sensors Conference (APOS2018). https://www.researchgate.net/publication/339642733_Haptic_perception_for_evaluating_viscoelastic_property_based_on_a_fiber_optic_mechanoreceptor_embedded_in_a_pseudo-finger